Back
=MEMO= Windlws 10 20H2 にバージョンアップされた時、「libusb.dllが有りません」と言うメッセージが表示されUSBが認識されないケースを確認しました。 この際には、新たにドライバをダウンロードするところから、下記の「ノードアダプター専用ドライバーのインストール」を実行してください。(2020.12.30 更新)
ノードアダプター専用ドライバーのインストール
■ ノードアダプターV7をWindows10に認識させる
従来、setup_7.exe をインストールするとUSBを接続するだけで簡単に認識してくれたのですが、Windows 8 からドライバーに[!]マークがついて認識してくれません。 さらに Windows 10 では署名が無いドライバーは100%拒否されます。
ノードアダプターV7はLinuxのLibUSBと言うドライバーを使用しています。左図をクリックしてWEBからドライバーを Download します。
libusb-win32-bin-1.2.6.0.zip

左図のように、inf-wizard.exe(設定で拡張子.exeなどを表示させています)が確認できます。
次のステップで、ドライバーをインストールする為の .inf ファイルを作成します。
先ず、inf-wizard.exe を立ち上げます。

- 最初の画面で[Next]すると、ドライバーの一覧画面になります。 ここで、Vendor ID: 0x04D8 Product ID: 0300 のドライバーを選択します。過去に純正のノードアダプター用ドライバーをインストールしたことがあれば、その名前も表示されています。

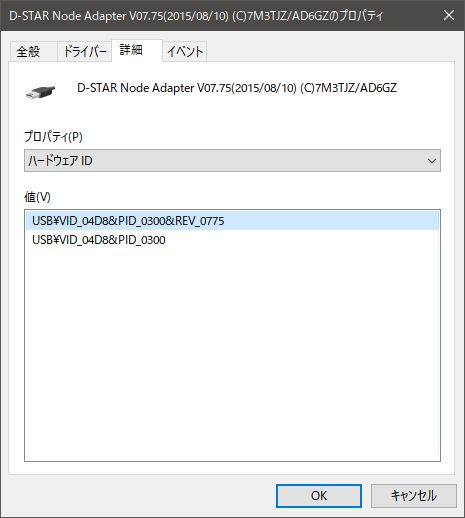
- ハードウェアID 又は名前の一致するものを選択して[Next]。

- 詳細に付いて名前などは書き換えることが出来ます。
- 確認して[Next]をクリックすると、保存画面が現れるので[ドライバー名.inf]を保存する。 次の段階でインストールする時保存したフォルダを指定する必要が有るため、忘れないようにしてください。

Windows 10 では署名の無いドライバーは拒否されますので、次の段階でこの制限を無効にしてから改めてインストールします。
- [Done]をクリックして終了します。
■ 署名の無いドライバーに対する制限を解除する

そこで、システム自体を一時的に「署名を必要としない」状態に設定します。
- [Shift]キーを押しながら[再起動]をクリックします。

- オプション選択画面が現れたら次のように選択して、最後に[再起動]します。
オプションの選択 │ └トラブルシューティング │ └詳細オプション │ └スタートアップ設定 │ └[再起動]

- マシンが再起動すると立ち上げ途中で、左図のような画面が現れます。
7)ドライバー署名の強制を無効にする
を選択するために[7]キー又は[F7]キーを押します。
これで、署名が無くてもインストール出来るようになります。
=MEMO= これでもインストールが出来ないケースもあるようですが、その時は「DOSコマンド」を管理者権限で立ち上げ、bcdedit /set TESTSIGNING ON を実行します。 インストールだけでなくドライバーの使用中も、この「テストモード」を継続させておく必要がある場合も有るようです。
不要な場合は bcdedit /set TESTSIGNING OFF を実行し解除します。
■ ドライバーのインストール

- [Start Menu]を右クリックして[デバイスマネージャー]を立ち上げます。
- 次にドライバーのインストールが終了していない目的のエントリーを右クリックして[ドライバーの更新]を選択します。

- [参照]ボタンをクリックして、最初の項で作成した ドライバー名.inf ファイルの有るフォルダを指定します。
- [次へ]をクリックします。

- 下段の[このドライバー ソフトウェアをインストールします]をクリックします。
ノードアダプター自体の調整作業まとめ
■ ノードアダプターV7の初期化、ファームウェアアップデート、テスト
アップデート・テスト用各ファイルを安田OMのサイトよりダウンロードしてください。ノードアダプターV7日本語サイト http://www.d-star.asia/node_adapter_v7.html.jaのページより
- rf_read V01.04 (RX test program)
- エコーテストプログラム(V00.03 06/14/09)とオーディオファイル(それぞれ別ファイル)
- 初期値設定プログラム「Default setting program V04.03 (10/31/2011 include DLL) V07.56以降で使用してください」 (V04.03と書かれていますが最上段は V04.04 です)
上記三ヶ所4ファイルをダウンロードしてください。
- Firmware Update Programs node_update_client.02.09.zip
日本語サイトにあるファイルは 02.08 で最新版は英語サイトにしか有りません。
=MEMO= 1,2の3ファイルはテスト用のひとつのフォルダ(仮に Tester)にまとめてください。オーディオは audio と言うフォルダになりますがそのまま同一フォルダに移動してください。他のZIPファイルは解凍したままのフォルダで構いません。アップデート用、設定用、テスト用の3つのフォルダが出来ます。
=MEMO= なお、初期化の必要な場合は同様に安田OMのサイトにて初期化の方法を確認の上、行って置いてください。初期化しなくてもファームウェアの上書きは可能です。
初期化 [〇 Init Value]を押しながら、[◉ Reset]をワン・プッシュ。
COSの黄色いLEDがパルシングしたら[〇 Init Value]を放す。
bootloader mode [◉ FW UPD]を押しながら、[◉ Reset]をワン・プッシュ。
COSの黄色いLEDがパルシングしたら[◉ FW UPD]を放す。
- 先ず[スタートメニュー]の[Windows システムツール]から[コマンド プロンプト]を右クリックし[その他]の中から[管理者として実行]します。
- さらに、次のコマンドでアップデートツールのフォルダに入ります。
- 最新版にアップデートします。(-p 889 は最新版へのポート指定です)
- アップデートされたファームウェアを個人の環境に合わせて設定します。
- Nodeadapter_set.04.04.exe を立ち上げ、[Setting]⇨[Basic Info.]と進みます。
- 規定値が表示されますが、アップデートや立ち上がらなくなった時のためにスクリーンショットを残しておくことをお勧めします。 右図は筆者の環境に合わせた設定値です。
- ノード用無線機とノードアダプターV7のケーブル接続を確認して、ハンディ機等でノードアダプターV7側の受信状態をテストします。Testerフォルダ内の rf_read.exe をダブルクリックします。
- この状態でハンディ機を送信すると、ノード用無線機が受信してデータ端子からノードアダプターV7にデータが流れ込み表示されます。
- 次に、送信テストをします。Testフォルダ内の echotest03.exe を立ち上げます。
- この状態で、ハンディ機でカーチャンクするとエコーサーバが応答します。
管理者: コマンド プロンプト
Microsoft Windows [Version 10.0.16299.192]
(c) 2017 Microsoft Corporation. All rights reserved.
C:\WINDOWS\system32>cd \Users\USER\desktop\node_update_client.02.09
C:\Users\USER\Desktop\node_update_client.02.09>
管理者: コマンド プロンプト
C:\Users\USER\Desktop\node_update_client.02.09>node_update_client -p 889 Node adapter Firmeware Update program V02.09 (C) 2010-2011 Satoshi Yasuda Do not distribute this program without my permission! Do you set the bootloader mode? Yes/No => Y Enter Serial Number => 999 Enter Version Number 6 or 7 => 7 Are you sure for update? Yes/No => yes DV Firmware Updater flash erasing: DONE. DV Firmware Updater id programming: DONE. DV Firmware Updater eeprom programming: DONE. DV Firmware Updater flash programming: DONE. DV Firmware Updater id programming: DONE. DV Firmware Updater eeprom programming: DONE. DV Firmware Updater flash verifying: DONE. DV Firmware Updater id verifying: DONE. DV Firmware Updater eeprom verifying: DONE. RESET Device Operation successfully completed. C:\Users\Yosh\Desktop\node_update_client.02.09>

グラフィカルツールなので、ダブルクリックして Nodeadapter_set.04.04 フォルダに入ります。

=MEMO= 安田OMのオリジナルサイトに掲載されているジャンパピンやトリマーによる設定が必要な場合は、次項のテストプログラムを併用してハードウェア調整をした上で初期値設定プログラムで変更するなど、微調整が必要です。
C:\Users\Yosh\Desktop\Tester\rf_read.exe
Node adapter RX Test program V01.05 (2010/12/14) (C) 2010 Satoshi Yasuda 7m3tjz/ad6gz Do not distribute this program without my permission! Node Adapter Firmware Information: D-STAR Node Adapter V07.75(2015/08/10) (C)7M3TJZ/AD6GZ This PIC program is licensed to JE3HCZ. Serial Number : 07000xxx.
C:\Users\Yosh\Desktop\Tester\rf_read.exe
Wed Jan 17 05:56:47 2018 YuCall : CQCQCQ MyCall : JE3HCZ MyCall2 : 3001 CRC : 93 5f Flags : 00 00 00 RPT2 : DIRECT RPT1 : DIRECT DV STREAM ba 2c 2e 40 81 18 3c a5 ca 55 2d 16 25 62 85 % b ・ **SYNC** a6 48 ac 79 86 c8 5f e6 6e 30 1c d2 40 53 41 @ S A 9b 2b a4 08 d1 56 af bd a4 31 1f a1 41 50 32 A P 2 f6 4a a4 38 d0 43 0f e2 d4 31 6f c4 41 20 57 A W bf 0e 3e 48 07 12 ed e4 f0 19 3d f6 69 72 65 i r e 5b 63 82 53 f7 52 aa 17 92 32 2b b3 42 64 20 B d 1a c0 06 32 45 ac 61 e4 66 47 61 a4 37 2e 37 7 . 7 1a 40 8e 22 c7 26 69 c7 66 33 7a b3 43 35 20 C 5 f3 4b 3a 00 66 08 da b1 a4 44 7e c5 34 31 56 4 1 V 4a 62 8c 5b 40 a4 0d 00 9e 16 29 f5 66 66 66 f f f 0b 81 8c 2a 50 5e ea 80 22 16 29 f5 66 66 66 f f f eb 4a 3e 10 66 03 ce e1 ac 16 29 f5 66 66 66 f f f ff c9 b8 00 85 0e ce 30 a8 16 29 f5 66 66 66 f f f bf 0e bc 40 37 52 ed e4 f0 16 29 f5 66 66 66 f f f ab cc b0 60 36 16 fd a4 f4 16 29 f5 66 66 66 f f f cf 0f bc 11 10 9d 85 a1 c8 16 29 f5 66 66 66 f f f bf 0e b8 50 e5 52 ed 65 f4 16 29 f5 66 66 66 f f f ab 4f bc 58 06 98 cd f4 f4 16 29 f5 66 66 66 f f f af cc b0 60 26 16 fd a4 f4 16 29 f5 66 66 66 f f f cf 0f bc 11 00 1f 8d a1 c8 16 29 f5 66 66 66 f f f bb 0e bc 40 07 12 ed e4 f0 16 29 f5 66 66 66 f f f cf 4f b8 01 c3 13 ad f1 8c 55 2d 16 25 62 85 % b ・ **SYNC** af cc b4 70 c4 16 fd 25 f0 25 4f 93 55 00 00 U cb 0f 3e 19 20 9d 85 a1 c8 70 0b da 00 44 49 D I bf 0e bc 40 27 12 ed e4 f0 25 1d d6 55 52 45 U R E bf 4e b8 50 c4 1e cd b4 b4 33 1b b3 43 54 20 C T ab 8c b8 40 67 16 e9 e5 f4 25 6f d7 55 20 44 U D af 0e b8 50 46 1e ed 74 f0 39 1d d6 49 52 45 I R E cf 0f b8 01 e2 1f 8d 30 8c 25 0c c7 55 43 54 U C T bb 0e bc 40 07 90 ed e4 f0 50 6f d0 20 20 43 C bf cc b4 78 47 5b f9 24 f4 55 55 55 25 1a c6 % ニ 55 c8 7a **Last Frame**
RXトリマ調整する時は、この様子を見ながらもっともスムーズにデータが流れる所を選びます。(夏と冬で調整が必要な場合も有ります)
また、全く反応しない時は前述の設定プログラム Nodeadapter_set.04.04 で RX Invert を反転(チェックがない場合付ける)します。
C:\Users\Yosh\Desktop\Tester\rf_read.exe
DV Echo Test program V00.03 Satoshi Yasuda PIC version: D-STAR Node Adapter V07.75(2015/08/10) (C)7M3TJZ/AD6GZ
C:\Users\Yosh\Desktop\Tester\rf_read.exe
Flags : 00 00 00 RPT2 : DIRECT RPT1 : DIRECT YuCall : CQCQCQ MyCall : JE3HCZ MyCall2: 3001 CRC : 93 5f
音声を送信すると、エコーサーバがそのままエコーを返してきます。
TXトリマを調整する時は、このエコーサーバの応答やエコーを利用して行います。 またハンディ機のSメータは振っているのに声にならない場合は設定プログラムで TX Invert を反転します。
以上で、アップデート及び調整・設定は終わりです。SAAPに接続したり、RaspberryPiとともにircDDBGateway/DStarRepeater(GMSK Modem)で使用する最善の状態となります。
73
JE3HCZ / XLX047 B















0 件のコメント:
コメントを投稿